Please note that this exam consists of multiple pages of questions. When you have answered all of the questions on this page, click the "Next" button to
move on to the next set of questions. Be sure to answer the questions on all of the pages before you submit your answers.
Question
1
For a robotic arm, which of the following is true?
Choose one answer.
| a. It is essential that it is operated in a closed loop. | ||
| b. Both speed control and position control are necessary. | ||
| c. The use of a camera with image processing can provide position feedback. | ||
| d. All of the above answers are correct. |
Question
2
The discipline of mechatronics is:
Choose one answer.
| a. the application of chemical engineering to mechanical engineering systems. | ||
| b. the optimization of the design of mechanical engineering systems in order to minimize energy consumption. | ||
| c. the integrated and synergetic application of electrical, electronic, computer, and control engineering to mechanical engineering systems. | ||
| d. the application of electrical engineering to the design of mechanical engineering systems. |
Question
3
What are the typical components of a mechatronic system?
Choose one answer.
| a. The controller, the actuator, and the physical system to be controlled | ||
| b. The controller, the actuator, the sensor, and the physical system to be controlled | ||
| c. The controller, the human interface, and the physical system to be controlled | ||
| d. The actuator and the sensor |
Question
4
What type of physical system can be controlled within a mechatronic system?
Choose one answer.
| a. An electrical system | ||
| b. A mechanical system | ||
| c. A fluidic (i.e., hydraulic or pneumatic) system | ||
| d. All of the above answers are correct. |
Question
5
Which of the following fields of engineering does NOT form part of the discipline of mechatronics?
Choose one answer.
| a. Electrical engineering | ||
| b. Control theory | ||
| c. Operations research | ||
| d. Electronic engineering |
Question
6
Which of the following is a mechatronic system?
Choose one answer.
| a. A fuel-oil storage tank | ||
| b. A vibrating beam | ||
| c. A temperature-measurement device | ||
| d. A water-pumping station |
Question
7
Which of the following is a mechatronic system?
Choose one answer.
| a. A room-temperature control system | ||
| b. An electronic display | ||
| c. A flywheel | ||
| d. A hydraulic damper |
Question
8
Which of the following is NOT a mechatronic system?
Choose one answer.
| a. A robotic arm | ||
| b. An anti-lock braking system | ||
| c. A suspension bridge | ||
| d. A washing machine |
Question
9
Which of the following is NOT a mechatronic system?
Choose one answer.
| a. An electrical motor | ||
| b. A heat-seeking missile | ||
| c. A liquid-level controller for a chemical process | ||
| d. A speed-and-position controller for an elevator |
Consider the following example of a mechatronic system before answering the following question.
A control system has been designed and installed in order to accurately control the level of an industrial fluid in a reaction tank. A centrifugal pump is used to pump the fluid into the tank from a storage tank located below, and a programmable logic controller is used to control the pump speed and to switch the pump on and off. An ultrasonic device is installed at the top of the reaction tank and provides an accurate reading of the level of fluid in the reaction tank. A touch screen is linked to the programmable logic controller, and a human operator can enter the desired level of the fluid on the touch screen. He or she can also program the system to run at different times of the day and on different days of the week.
A control system has been designed and installed in order to accurately control the level of an industrial fluid in a reaction tank. A centrifugal pump is used to pump the fluid into the tank from a storage tank located below, and a programmable logic controller is used to control the pump speed and to switch the pump on and off. An ultrasonic device is installed at the top of the reaction tank and provides an accurate reading of the level of fluid in the reaction tank. A touch screen is linked to the programmable logic controller, and a human operator can enter the desired level of the fluid on the touch screen. He or she can also program the system to run at different times of the day and on different days of the week.
Question
10
What is the physical system to be controlled in this case?
Choose one answer.
| a. The centrifugal pump | ||
| b. The ultrasonic device | ||
| c. The reaction tank and its contained fluid | ||
| d. The programmable logic controller |
Question
11
Which component of this mechatronic system does the centrifugal pump represent?
Choose one answer.
| a. The controller | ||
| b. The actuator | ||
| c. The sensor | ||
| d. The physical system |
Consider the following example of a mechatronic system before answering the following 2 questions.
An elevator car is driven by an AC induction motor. A micro-controller is used to control the system. The micro-controller registers passenger calls and sends out information to the LCD displays and gongs. It also controls the movement of the elevator and receives feedback from the various sensors (e.g., speed and position sensors). The elevator speed feedback is provided by a shaft encoder, and the position feedback is provided by optical switches and magnetic switches.
An elevator car is driven by an AC induction motor. A micro-controller is used to control the system. The micro-controller registers passenger calls and sends out information to the LCD displays and gongs. It also controls the movement of the elevator and receives feedback from the various sensors (e.g., speed and position sensors). The elevator speed feedback is provided by a shaft encoder, and the position feedback is provided by optical switches and magnetic switches.
Question
12
In which of the following aspect/s is this mechatronic system unique?
Choose one answer.
| a. It contains an open loop. | ||
| b. It has two control variables (speed and position). | ||
| c. It requires precise control in order to achieve the required dynamic response. | ||
| d. Answers B and C are both correct. |
Question
13
What is the actuator component in this mechatronic system?
Choose one answer.
| a. The micro-controller | ||
| b. The shaft encoder | ||
| c. The optical and magnetic switches | ||
| d. The AC induction motor |
Question
14
What is the physical system that is being controlled in this mechatronic system?
Choose one answer.
| a. The AC induction motor | ||
| b. The elevator car and its traveling passengers | ||
| c. There is no physical system in this case. | ||
| d. The shaft encoder |
Question
15
A resistor is an electrical-passive component that:
Choose one answer.
| a. opposes the flow of an electrical current. | ||
| b. stores energy. | ||
| c. converts electrical energy into heat. | ||
| d. Answers A and C are both correct. |
Question
16
Analogies are helpful in understanding one system through prior knowledge of another. In comparing mechanical and electrical systems, which of the
following analogies may be drawn?
Choose one answer.
| a. A resistor is similar to a spring; a capacitor is similar to a mass; and an inductor is similar to a damper. | ||
| b. A resistor is similar to a damper; a capacitor is similar to a spring; and an inductor is similar to a mass. | ||
| c. A resistor is similar to a mass; a capacitor is similar to a spring; and an inductor is similar to a damper. | ||
| d. A resistor is similar to a mass; a capacitor is similar to a damper; and an inductor is similar to a spring. |
Question
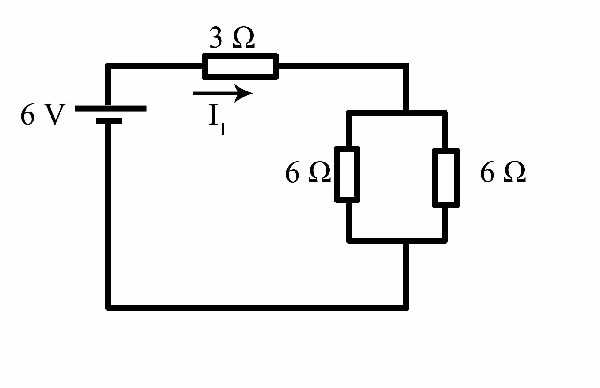
17
Based on this figure of a series parallel resistive circuit, what is the value of the current I1?
Choose one answer.
| a. 1.0 A | ||
| b. 2.0 A | ||
| c. 3.0 A | ||
| d. 0.5 A |
Question
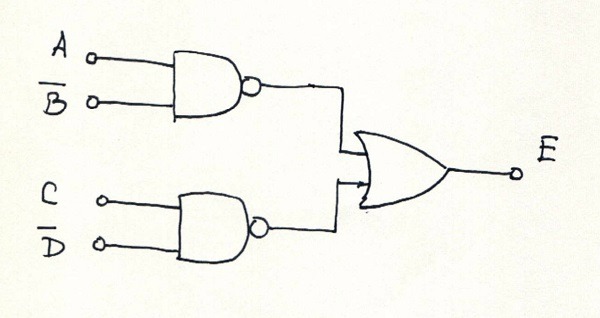
18
The logic circuit shown in this figure is represented by which of the following formulas?
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
|
d. |
Question
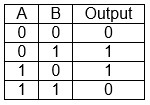
19
This truth table is that of which of the following gates?
Choose one answer.
| a. An AND gate | ||
| b. An AND gate | ||
| c. A NAND gate | ||
| d. An XOR gate |
Question
20
When combining electrical components, which of the following steps is NOT correct?
Choose one answer.
| a. Adding resistors in parallel | ||
| b. Adding capacitors in parallel | ||
| c. Adding resistors in series | ||
| d. Adding inductors in series |
Question
21
When connecting two resistors in parallel, what is the overall resistance equal to?
Choose one answer.
| a. The arithmetic sum of the two resistors | ||
| b. The arithmetic difference between the two resistors | ||
| c. The product of the two resistors divided by the sum of the two resistors | ||
| d. The sum of the two resistors divided by the product of the two resistors |
Question
22
When considering the value of inductance of a coil, which of the following statements is NOT correct?
Choose one answer.
| a. The value of the inductance is proportional to the square of the number of coils. | ||
| b. The value of the inductance is proportional to the permeability of the core, where the core is the material inside the coil. | ||
| c. The value of the inductance is proportional to the length of the coil. | ||
| d. The value of the inductance is proportional to the area of the coil. |
Question
23
Which of the following characteristics applies to a diode?
Choose one answer.
| a. It is the junction created at the border between a P-type material and an N-type material. | ||
| b. It can be used to rectify an electrical current, allowing the current to pass in one direction only. | ||
| c. It can be used to amplify voltage. | ||
| d. Answers A and B are both correct. |
Question
24
Which of the following statements is true?
Choose one answer.
| a. A capacitor stores electrical energy on its plates by virtue of its accumulated charge. | ||
| b. A capacitor stores magnetic energy by virtue of the electrical current flowing through it. | ||
| c. The capacitance of a capacitor is inversely proportional to the area of its plates. | ||
| d. The capacitance of a capacitor is directly proportional to the distance between its plates. |
Question
25
A gearbox is used to reduce the speed from a motor tenfold. If the input torque to the gearbox is 300 Nm and the efficiency of the gearbox is 75%, what is
the output torque of the gearbox?
Choose one answer.
| a. 4000 Nm | ||
| b. 225 Nm | ||
| c. 3000 Nm | ||
| d. 2250 Nm |
Question
26
A hoisting application involves lifting a 20-metric-ton load at a speed of 1 m/s. What is the ideal motor to select for such an application?
Choose one answer.
| a. A stepper motor | ||
| b. A servomotor | ||
| c. A squirrel-cage induction motor | ||
| d. Any of the above motors would work well. |
Question
27
A three-phase squirrel-cage induction motor has four poles and is fed from a supply with a frequency of 50 Hz. If this motor runs at a slip of 5%, what is
the speed of its rotor?
Choose one answer.
| a. 1500 rpm | ||
| b. 2850 rpm | ||
| c. 1425 rpm | ||
| d. 1500 radians per second |
Question
28
A three-phase squirrel-cage induction motor has six poles and is fed from a 60-Hz supply. What is the rotational speed of the magnetic flux inside the
motor?
Choose one answer.
| a. 1200 rpm | ||
| b. 1150 rpm | ||
| c. 1000 rpm | ||
| d. 950 rpm |
Question
29
How many wires does a permanent magnet DC motor have?
Choose one answer.
| a. 2 wires | ||
| b. 3 wires | ||
| c. 4 wires | ||
| d. 5 wires |
Question
30
The field in a DC motor is generated using which of the following devices?
Choose one answer.
| a. An electromagnet fitted on the stator | ||
| b. A permanent magnet fitted on the stator | ||
| c. A permanent magnet fitted on the rotor (the armature) | ||
| d. Answers A and B are both correct. |
Question
31
What is a solenoid?
Choose one answer.
| a. A rotary actuator that uses a coil and a permanent magnet core | ||
| b. A linear actuator that uses a coil and a soft iron core | ||
| c. A rotary actuator that uses a coil and a soft iron core | ||
| d. A linear actuator that uses a coil and a permanent magnet |
Question
32
What is the main disadvantage of brushed DC motors?
Choose one answer.
| a. They provide insufficient starting torque. | ||
| b. They require significant maintenance of the brushes and the commutator segments. | ||
| c. They cannot be used in variable speed drives. | ||
| d. They require a feedback device for speed control. |
Question
33
What is the output power of an electrical motor in watts the product of?
Choose one answer.
| a. The output torque in Nm and the mechanical rotational speed in revolutions per minute | ||
| b. The output torque in Nm and the mechanical rotational speed in radians per second | ||
| c. The output force in N and the mechanical rotational speed in radians per second | ||
| d. The output force in N and the mechanical rotational speed in revolutions per second |
Question
34
Which of the following actuators is suitable for indexing applications in which the load needs to be moved by small, accurate displacements?
Choose one answer.
| a. A servomotor | ||
| b. A squirrel-cage induction motor | ||
| c. A brushed permanent magnet DC motor | ||
| d. A stepper motor |
Question
35
Which of the following is NOT true of an electric motor?
Choose one answer.
| a. It is a rotary actuator. | ||
| b. It converts mechanical energy into electrical energy. | ||
| c. It provides an output torque. | ||
| d. It is operated from an electrical supply. |
Question
36
Which of the following motors does NOT require an additional feedback device?
Choose one answer.
| a. A brushless DC motor | ||
| b. A brushed DC motor | ||
| c. A servomotor | ||
| d. A squirrel-cage induction motor |
Question
37
Why is a gearbox used in mechatronic systems?
Choose one answer.
| a. It reduces the speed and increases the torque. | ||
| b. It reduces the speed and reduces the torque. | ||
| c. It increases the speed and increases the torque. | ||
| d. None of the above answers is correct. |
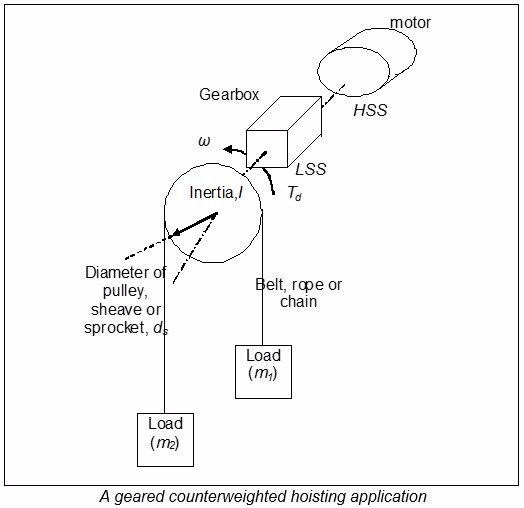
This figure illustrates a geared hoist application. Study the figure and consider the following conditions in order to answer the following 2
questions.
A motor is used to hoist a counterweighted load. The motor uses a sheave with a diameter of 0.63 m, and the gearbox reduction ratio is 40:1. Assume that the gearbox has an efficiency of 80%, the mass m1 is 1600 kg, and the mass m2 is 1300 kg. Also assume that the acceleration due to gravity is 9.81 m/s2.
A motor is used to hoist a counterweighted load. The motor uses a sheave with a diameter of 0.63 m, and the gearbox reduction ratio is 40:1. Assume that the gearbox has an efficiency of 80%, the mass m1 is 1600 kg, and the mass m2 is 1300 kg. Also assume that the acceleration due to gravity is 9.81 m/s2.
Question
38
If the motor in the figure above is running at a top speed of 1212 rpm, what is the linear speed of the load?
Choose one answer.
| a. 0.5 m/s | ||
| b. 1 m/s | ||
| c. 2 m/s | ||
| d. 40 m/s |
Question
39
In the figure above, if the load m1 is running in the upward direction at a speed of 1 m/s, what is the required power rating of the motor?
Choose one answer.
| a. 28449 W | ||
| b. 35561 W | ||
| c. 3678 W | ||
| d. 2943 W |
Question
40
In the figure above, what is the initial torque required from the motor to cause an initial upward linear acceleration of 1 m/s2 to the load
m1?
Choose one answer.
| a. 28.97 Nm | ||
| b. 57.515 Nm | ||
| c. 2300 Nm | ||
| d. 28.55 Nm |
Question
41
A linear variable differential transformer (LVDT) comprises which of the following?
Choose one answer.
| a. One primary coil and one secondary coil | ||
| b. One primary coil and two secondary coils | ||
| c. Two primary coils and one secondary coil | ||
| d. Two primary coils and two secondary coils |
Question
42
A seismic accelerometer operates on which of the following principles?
Choose one answer.
| a. The stress in a cantilevered beam changes in proportion to the value of the acceleration. | ||
| b. The mass in a spring-mass damper system is displaced in response to the change in the value of the acceleration. | ||
| c. A charge is generated in a piezoelectric material in response to the change in acceleration. | ||
| d. None of the above answers is correct. |
Question
43
Consider the following sequence of Gray code patterns.
0000
0001
0011
0010
What should be the next Gray code pattern?
0000
0001
0011
0010
What should be the next Gray code pattern?
Choose one answer.
| a. 0011 | ||
| b. 0000 | ||
| c. 0110 | ||
| d. 1010 |
Question
44
How many axes can an accelerometer have?
Choose one answer.
| a. One axis | ||
| b. Two axes | ||
| c. Up to three axes | ||
| d. The number of axes can be electronically configured by processing the output signal. |
Question
45
Shaft encoders are used as feedback devices for which of the following variables?
Choose one answer.
| a. Position | ||
| b. Speed | ||
| c. Position and speed | ||
| d. None of the above answers is correct. |
Question
46
What does the resolution of an absolute shaft encoder depend on?
Choose one answer.
| a. The number of terminals | ||
| b. The size of the encoder | ||
| c. The number of bits it uses | ||
| d. The motor shaft to which it is connected |
Question
47
What is the advantage of using Gray code in absolute shaft encoders?
Choose one answer.
| a. Using Gray code increases the resolution of the encoder. | ||
| b. Using Gray code prevents errors and ambiguities in the bit switching patterns. | ||
| c. Using Gray code improves the speed of response of the encoder. | ||
| d. Using Gray code reduces the required number of wires. |
Question
48
When considering incremental shaft encoders, what is the MAIN purpose of the two quadrature outputs A and B?
Choose one answer.
| a. The two outputs are used to indicate the position. | ||
| b. The two outputs are combined in order to increase the resolution. | ||
| c. The two outputs provide redundancy, so that one can be used in case of failure of the other. | ||
| d. The two outputs are processed in order to find the direction of rotation. |
Question
49
Which of the following is NOT true regarding the linear variable differential transformer (LVDT)?
Choose one answer.
| a. It produces an output voltage proportional to the position of a ferromagnetic core inside the coils. | ||
| b. It is operated from an alternating current (AC) source. | ||
| c. It relies on mutual inductance between coils. | ||
| d. It transforms a change in voltage into linear movement. |
Question
50
Which of the following types of phenomena do shaft encoders rely upon for their operation?
Choose one answer.
| a. Electromagnetic | ||
| b. Optical | ||
| c. Thermal | ||
| d. Ultrasonic |
Question
51
Why are feedback devices used in mechatronic systems?
Choose one answer.
| a. They are used to monitor the value of the controlled variable. | ||
| b. They are used to compensate for variations in the value of the controlled variable due to disturbances. | ||
| c. They are used to quickly respond to required changes in the output variable. | ||
| d. All of the above answers are correct. |
Question
52
Why is it important to know the resonant frequency of an accelerometer?
Choose one answer.
| a. The resonant frequency of an accelerometer is used to measure an acceleration signal that has the same resonant frequency. | ||
| b. The resonant frequency of an accelerometer is used to measure an acceleration signal the frequency of which is far from the resonant frequency. | ||
| c. Knowing the resonant frequency of an accelerometer helps prevent damage to the accelerometer. | ||
| d. Knowing the resonant frequency of an accelerometer helps reduce the energy consumption of the accelerometer. |
Question
53
A digital-to-analog converter is required in a mechatronic system for which of the following reasons?
Choose one answer.
| a. It converts the output signals from the mechatronic system controller to the physical world. | ||
| b. Most signals in the physical world are in digital format. | ||
| c. The processing in mechatronic controllers is in analog format. | ||
| d. Answers A and B are both correct. |
Question
54
A feedback signal has a frequency of 400 Hz. It is contaminated with noise in the range of 10 Hz to 10 kHz. Which of the following signal processing
circuits is needed to remove the noise?
Choose one answer.
| a. A low-pass filter | ||
| b. A high-pass filter | ||
| c. A band-stop filter | ||
| d. A band-pass filter |
Question
55
A feedback signal has an amplitude of 30 mV (peak to peak) and a frequency of 1000 Hz. In order to convert it to a DC signal with the same magnitude, which
of the following signal processing circuits is/are required?
Choose one answer.
| a. An amplifier and a bridge rectifier | ||
| b. A precise rectifier | ||
| c. A precise rectifier and an amplifier | ||
| d. An integrator |
Question
56
A notch filter achieves which of the following actions?
Choose one answer.
| a. It passes high frequencies and blocks low frequencies. | ||
| b. It passes low frequencies and blocks high frequencies. | ||
| c. It passes frequencies within a certain band. | ||
| d. It blocks a very narrow range of frequencies. |
Question
57
An analog-to-digital converter is required in a mechatronic system for which of the following reasons?
Choose one answer.
| a. It converts the output signals from the mechatronic system controller to the physical world. | ||
| b. Most signals in the physical world are in analog format. | ||
| c. The processing in mechatronic controllers is in digital format. | ||
| d. Answers B and C are both correct. |
Question
58
An integrator contains which of the following components?
Choose one answer.
| a. A resistor, a capacitor, and an inductor | ||
| b. A resistor and an inductor | ||
| c. A resistor, a capacitor, and an operational amplifier | ||
| d. A capacitor and an inductor |
Question
59
Consider the following scenario: A mobile mechatronic system has an onboard seismic accelerometer that measures acceleration in two axes. In order to
derive displacement (distance) from this signal, which of the following signal processing circuits is/are needed?
Choose one answer.
| a. A single integrator | ||
| b. A double integrator | ||
| c. A differentiator | ||
| d. A differentiator and an integrator |
Question
60
This diagram of a signal processing circuit is an example of which of the following types of processing circuits?
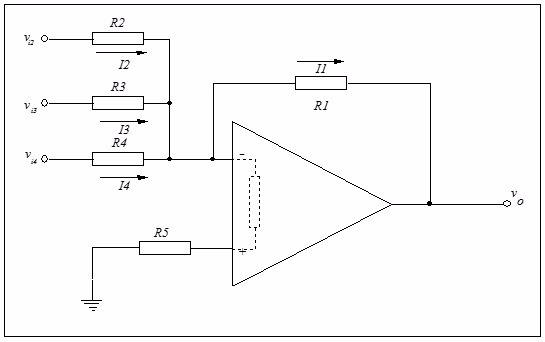
Choose one answer.
| a. A summing amplifier | ||
| b. A difference amplifier | ||
| c. An instrumentation amplifer | ||
| d. A differentiator |
Question
61
What is the fastest type of analog-to-digital converter?
Choose one answer.
| a. The flash analog-to-digital converter | ||
| b. The successive approximation analog-to-digital converter | ||
| c. The tracking analog-to-digital converter | ||
| d. The dual slope analog-to-digital converter |
Question
62
What is the main disadvantage of the tracking analog-to-digital converter?
Choose one answer.
| a. The complexity of its circuitry | ||
| b. Its inaccuracy | ||
| c. Its output, which is never stable and keeps moving around the true value of the measured voltage | ||
| d. Its susceptibility to noise |
Question
63
When a signal has a small amplitude in a noisy environment and requires amplification prior to processing, it is usually best to use which of the following
signal processing circuits?
Choose one answer.
| a. A summing amplifier | ||
| b. A difference amplifier | ||
| c. A comparator | ||
| d. An instrumentation amplifier |
Question
64
Why is a differentiator not usually used in signal processing circuits?
Choose one answer.
| a. It is not practical to construct the components. | ||
| b. Its cost is higher than that of an integrator. | ||
| c. A differentiator tends to amplify noise signals (especially those that have high frequencies). | ||
| d. It is not possible to attain the exact values of the required components due to manufacturing tolerances. |
Question
65
The transfer function is a mathematical expression that describes which of the following?
Choose one answer.
| a. The magnitude ratio between the input signal and the output signal of a system | ||
| b. The dynamic relationship between the input variable and the output variable of a system | ||
| c. The number of inputs of a mechatronic system | ||
| d. The number of outputs of a mechatronic system |
Question
66
What is the basic parameter that is used as the foundation for the transfer function?
Choose one answer.
| a. s, the complex frequency | ||
| b. f, the frequency | ||
| c. ω, the radian frequency | ||
| d. None of the above answers is correct. |
The following 2 questions are based on this diagram of a spring mass damper system. In this system, the mass can only move in the direction of x(t).
Thus, the input is the force, f(t), applied to the mass, and the output is the displacement of the mass, x(t). k is the spring
constant, and b is the damper constant.

Question
67
The differential equation that describes the dynamics of the system shown in the diagram above is:
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
|
d. |
Question
68
The system shown in the diagram above comprises which of the following?
Choose one answer.
| a. The spring and the damper | ||
| b. The mass | ||
| c. The mass, with the force applied to it | ||
| d. The spring, the mass, and the damper |
Question
69
The transfer function for the system shown above is:
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
|
d. |
Question
70
What is the order of the system in the diagram above?
Choose one answer.
| a. A first-order system | ||
| b. A second-order system | ||
| c. A third-order system | ||
| d. The order of the system cannot be identified without more information. |
The following question is based on the figure below, which shows a mass damper that can move in one direction only. The input to the system is the force
(f(t)).
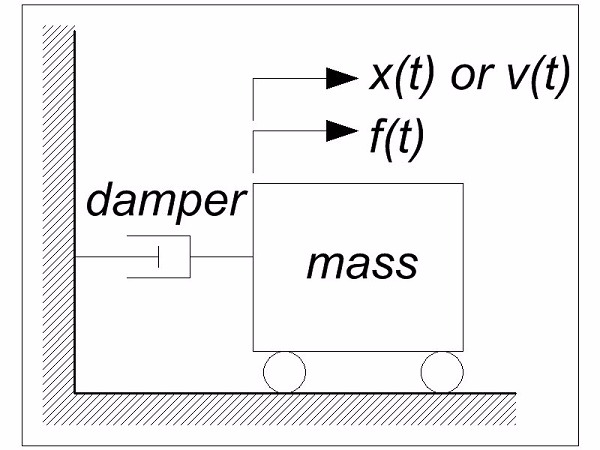
Question
71
If the output of the system above is the displacement (x(t)), what is the order of the system?
Choose one answer.
| a. First-order system | ||
| b. Second-order system | ||
| c. Third-order system | ||
| d. The order of the system cannot be identified without more information. |
Question
72
If the output of the system above is the velocity (v(t)), what is the order of the system?
Choose one answer.
| a. First-order system | ||
| b. Second-order system | ||
| c. Third-order system | ||
| d. The order of the system cannot be identified without more information. |
The following 2 questions are based on the figure below, which is a diagram of an RC circuit. The input voltage, vi(t), is introduced
into the circuit from the left, and the output voltage, vo(t), is measured at the right.
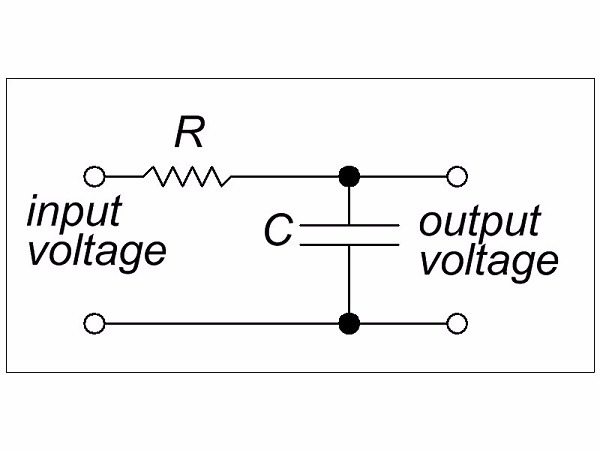
Question
73
If the input signal is a step function with a magnitude of 1 V, then the output voltage can be described by which of the following functions?
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
|
d. |
Question
74
If the input to the system is the voltage vi(t), and the output of the system is the voltage vo(t), what is the order
of the system?
Choose one answer.
| a. A first-order system | ||
| b. A second-order system | ||
| c. A third-order system | ||
| d. The order of the system cannot be identified without more information. |
Question
75
The transfer function between the input voltage and the output voltage can be described by which of the following transfer functions?
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
|
d. |
Question
76
What is the differential equation that describes the dynamics of the system shown in the diagram above?
Choose one answer.
|
a. |
||
|
b. |
||
|
c. |
||
| d. Answers A and C are both correct. |
Question
77
Which of the following is NOT a type of controller used in mechatronic systems?
Choose one answer.
| a. A microcontroller | ||
| b. An accelerometer | ||
| c. A programmable logic controller | ||
| d. A relay controller |
Question
78
Which of the following types of controllers includes suitable interfaces for inputs and outputs?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
79
Which of the following types of controllers is NOT suitable for use in harsh environments (e.g., dusty, humid, or hot environments)?
Choose one answer.
| a. A microprocessor | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
80
Which of the following types of controllers is NOT suitable for use in systems in which space is restricted?
Choose one answer.
| a. A microprocessor | ||
| b. A programmable logic controller | ||
| c. A digital signal-processing integrated circuit | ||
| d. A microcontroller |
Question
81
Which of the following types of controllers is suitable for use in a conveyor belt system for sorting packets?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
82
Which of the following types of controllers is suitable for use in a robotic arm system to be manufactured in large numbers?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
83
Which of the following types of controllers is suitable for use in a system that performs face-recognition identification of passengers to compare them
with photographs saved on a database?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
84
Which of the following types of controllers is suitable for use in a system that requires intensive video processing?
Choose one answer.
| a. A digital signal-processing integrated circuit | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. Answers A and C are both correct. |
Question
85
Which of the following types of controllers is suitable for use in a washing machine?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
86
Which of the following types of controllers is suitable for use in mechatronic systems that are to be manufactured in large numbers?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
87
Which of the following types of controllers uses "ladder logic" as a programming tool?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
88
Which of the following types of controllers usually has the highest monetary cost?
Choose one answer.
| a. A relay controller | ||
| b. A programmable logic controller | ||
| c. A PC-based controller | ||
| d. A microcontroller |
Question
89
A control system is used to position a robotic arm at an angle of 45º. If the robotic arm settles at an angle of 44º, the difference is referred to as:
Choose one answer.
| a. Overshoot | ||
| b. Rise time | ||
| c. Steady state error | ||
| d. Settling time |
Question
90
In the context of the dynamic system user requirements, the rise time is important for which of the following reasons?
Choose one answer.
| a. It reduces the energy consumption. | ||
| b. It ensures that the system attains its final value within an acceptable time frame. | ||
| c. It prevents damage to the system. | ||
| d. None of the above answers is correct. |
Question
91
In which mechatronic system design stage is a computer-aided design (CAD) model of the system produced?
Choose one answer.
| a. The concept design stage | ||
| b. The modelling and simulation stage | ||
| c. The mechanical, software, electronics and interface design stage | ||
| d. The prototyping, testing and implementation stage |
Question
92
In which mechatronic-system design stage are the system components selected?
Choose one answer.
| a. The concept design stage | ||
| b. The modelling and simulation stage | ||
| c. The mechanical, software, electronics and interface design stage | ||
| d. The prototyping, testing and implementation stage |
Question
93
In which of the following stages is the cost of an error in mechatronic-system design the highest?
Choose one answer.
| a. The concept design stage | ||
| b. The modelling and simulation stage | ||
| c. The prototype stage | ||
| d. There is no difference among any of these stages. |
Question
94
Some of the user requirements for mechatronic system design are related to the dynamic performance of the system. In such a context, what is the percentage
overshoot?
Choose one answer.
| a. The highest value that the output of the system attains, expressed as a percentage of the final value | ||
| b. The lower value that the output of the system attains, expressed as a percentage of the final value | ||
| c. The time taken to reach the final value | ||
| d. The final value of the system |
Question
95
What is the first step that must be carried out in the mechatronic system design procedure?
Choose one answer.
| a. Identifying the user requirements | ||
| b. Creating the concept design | ||
| c. Modelling and simulation | ||
| d. Building the prototype |
Question
96
What is the importance of the modelling and simulation design stage in mechatronic system design?
Choose one answer.
| a. It allows the designer to select the mechanical components. | ||
| b. It allows the designer to select the control strategy. | ||
| c. It allows the designer to verify that the plant meets the given design specifications. | ||
| d. It allows the design to produce the block diagram of the system. |
Question
97
What is the most important output of the mechatronic system concept design stage?
Choose one answer.
| a. A detailed design | ||
| b. A selection of all the components | ||
| c. A block diagram of the system | ||
| d. A working prototype of the system |
Question
98
What is the rise time of a system?
Choose one answer.
| a. The time required for the system to reach its steady-state value | ||
| b. The time required for the system to reach 67% of its final value | ||
| c. The time required for the system to move from 10% to 90% of its final value | ||
| d. The time required for the system to reach zero |
Question
99
When attempting to select a suitable controller for a mechatronic system, the design should start with which of the following controllers?
Choose one answer.
| a. The on/off controller | ||
| b. The simple constant-gain feedback controller | ||
| c. The lead/lag compensator |
Question
100
When building a model of the plant, which of the following parts of the plant should the designer include in the mixed model?
Choose one answer.
| a. The electrical parts | ||
| b. The electronic parts | ||
| c. The mechanical parts | ||
| d. All of the above answers are correct. |